

image credits: eatuppizza
Microphone Selection—Specifications
On the topic of microphone specifications, there is both good news and bad news. The good news is that most microphone manufacturers supply relatively complete and standardized specifications, which enhance comparisons between models. The bad news is that these specifications are not well understood by many audio technicians, leading some to believe that they are of no use at all. This post will attempt to dispel that notion by explaining the application of microphone specifications.
The most often heard compliant about specifications is they don’t tell the user how the microphone sounds—which is only true in a limited sense, if the polar pattern and frequency response charts are accurate. More to the point, the feeling is that a specification might not tell you if a given microphone will work with a desired source.
It is true that a specification can’t tell if a particular microphone will sound good on a highly variable source, such as solo vocal. Indeed, the most reliable method for vocal production is to audition a few select choices. However, for most other applications, specifications can provide reliable information on microphones that are to be avoided for that application. That is, a specification might not tell the audio technician if a microphone will sound good with a source, but they should give a strong indication if that microphone would not work well at all!
So let’s dig in and see what we can learn. Let’s use a sample of well-known microphones from Shure® in our case study, the SM57, Beta 57A, SM81, and KSM44A.
Operating principle, polar pattern, and diaphragm size
These three elements have a strong influence on all of the other specifications, and best of all, there aren’t too many numbers involved! So in understanding how these factors affect microphone performance, we can get most of the information we need.
Operating principle
There are two major categories of microphone operating principle: condenser (or capacitor) microphones, and dynamic microphones. Dynamic microphones can be further subdivided into moving-coil and ribbon types. And then there are the lesser-seen types, including piezoelectric (contact) microphones, and crystal microphones (such as the Shure 707A and Astatic JT30, popular with blues harmonica players). And there was even this microphone invented a few years ago using smoke and lasers! But in this post, we will discuss only condenser and dynamic microphones.
Condenser microphones
Condenser microphones have one or more diaphragms (made from a very light, durable, and flexible material, such as Mylar, with a thin metal layer applied) placed very very close to one or more metal backplates; those two elements forming a capacitor (definition: two conductors separated by an insulator; in this case, air)—“condenser” being an old term for capacitor. When the diaphragm moves due to a change in air pressure with respect to the backplate, the capacitance necessarily changes. Either the diaphragm or the backplate is also charged, thereby causing a weensy amount of current to flow as a result of the change in capacitance—that current is our audio signal.
Condenser microphones are either permanently polarized (“electret”) or must be externally polarized by a high voltage—usually between 40-130V, depending on the design. Externally polarized condensers are sometimes called “true” condensers, which is not accurate as electret capsules are also really truly capacitors!
The smallest condenser microphones are almost all electrets, due to the simplicity of their design. Despite a sometimes common belief, there is no characteristic sonic difference between the two types; but as electrets tend to be smaller (although there are electret capsules as large as 25mm), the quietest condensers (<10dBA self-noise) are almost all externally polarized. Externally polarized capsules are also available in designs that allow for selectable or variable polar patterns using a single capsule. (To this author’s knowledge, there are no single-capsule variable pattern electrets, although there are dual- or multi-capsule multipattern electrets, including the Naiant X-8S).
Condenser microphones, whether electret or externally polarizared, have the property of being very responsive to transient signals because their moving mass is very low. Thus, they are often selected where high-frequency accuracy is desired. Also, they are capable of the lowest-possible noise floor, so they are preferred for quiet sources. Finally, they can be made in just about any practical size, with capsules ranging from 3mm to 32mm in commercial models. The smaller end of that range is used for applications where the microphone must be unobtrusive or very light, such as lapel and instrument-mount applications—or inside a cell phone!
It sounds like condenser microphones are good for everything, doesn’t it? Maybe so, but there are applications for dynamic microphones as well. The main disadvantage of condenser microphones is they need an amplifier directly at the capsule, because of that weensy output current available is insufficient to drive all but the shortest (think millimeters) length of cable. That means that condenser microphones require a power source for their capsule amplifier. With its onboard amplifier, a condenser microphone becomes capable of a high output with low noise and can drive any practical cable length.
Dynamic microphones
Dynamic moving-coil microphones work like little speakers in reverse: the coil is attached to the diaphragm, which is moved by acoustic energy over a magnet, causing a current to be induced in the coil. Obviously, the mass of a coil is much greater than a small piece of Mylar, so the transient response of the moving-coil microphone is much slower. With slow transient response and low output, moving-coil microphones are generally not selected for distant-micing applications due to frequency response and noise concerns.
The main advantages of the moving-coil dynamic are their durability (the Shure SM58 is famously said to be capable of driving nails), low cost, and lack of special requirements from the microphone preamplifier. They have historically been the choice for live sound reinforcement, although both condensers and ribbon microphones have increased their stage presence in recent years.
Ribbon microphones are a special type of dynamic microphone that substitute a very thin corrugated strip of metal foil for the moving coil. Replacing the moving coil with a ribbon solves the problem of slow transient response, but the very low output of the ribbon creates a requirement for a very high quality step-up transformer in the microphone coupled to a very low noise microphone preamplifier. Royer® has an excellent discussion of these properties.
Unfortunately, inexpensive ribbon microphones are often lacking in transformer quality, resulting in unsatisfactory noise performance and sometimes other undesired traits as well. Other disadvantages of ribbons include that they are mainly available in bidirectional polar patterns, their fragile ribbon element must be protected from wind and other shocks, and in rare circumstances the ribbon element can be destroyed by the (mis)application of phantom power.
Polar pattern
A microphone’s polar pattern is the measure of its sensitivity relative to the angle of incidence of sound to its capsule. Polar pattern will vary to some degree by frequency, and thus frequency response is also partly a function of polar pattern.
Polar patterns range between the two extremes of pure pressure (omnidirectional) and pure pressure gradient (bidirectional, or figure-8) response. In between are the intermediate patterns: subcardioid, cardioid, supercardioid, hypercardioid. Many audio technicians default to the midrange pattern—cardioid—without giving too much thought to the other patterns. But each pattern has its application, whether in studio recording, concert recording, or live sound reproduction. The most obvious characteristic of polar pattern is the angle of maximum rejection, which varies from 90 degrees for bidirectional to 180 degrees for cardioid. Of course, a pure omnidirectional microphone has no rejection at all.

It is important to note two related physical principles of polar pattern: first, given other properties of a design being equal, that low frequency response will be decreased for pressure gradient microphones, and second, that proximity effect will increase for the same. Proximity effect is the increase in low-frequency response as the distance from microphone to source decreases. It is thus a critical factor for placement of directional microphones—both the desired recording distance and frequency response are interrelated functions. Thus, microphone distance-to-source and desired low frequency response influence the selection of polar pattern.
Diaphragm size
Larger diaphragms generally mean higher output, but the large size of the diaphragm will decrease transient response, and will also cause a greater variation in frequency and polar response. Thus, large diaphragm microphones are often selected for sources that are mainly on-axis. Smaller diaphragm microphones are generally preferred where sources are not directly on-axis, as with many stereo microphone techniques.
Here’s a table that summarizes these factors:
| Condenser | Dynamic Moving-coil | Dynamic Ribbon | |
| Output | High | Low | Low |
| Effective Self-Noise | Varies, can be <10dBA | Typically >15dBA | Typically >17dBA |
| Transient Response | Fast | Slow | Fast |
| Minimum Case Size | Smallest | Medium | Largest |
| Durability | Fair to Good | Best | Subject to mechanical and electrical damage |
| Special Amplifier Requirements | Power supply for amplifier at capsule | None | Low input noise, high input impedance may be helpful |
| Available Polar Patterns | Any, including line+gradient (shotgun) | cardioid, supercardioid, hypercardioid, omnidirectional | Mostly bidirectional; a few cardioid models. |
| Diaphragm size | Any | Medium to Large | Medium |
| Multichannel | Stereo and surround models available | N/A | Stereo models available |
Now that we’ve gained an understanding of the physical factors of operating principle, polar pattern, and diaphragm size, let’s dig into the numbers!
Sensitivity, Self-Noise, Dynamic Range, and Maximum SPL
Next we consider four inter-related figures that describe the microphone’s performance on sources of different volume, and tell us what to expect for required gain from the microphone preamplifier. Before we jump in, we will review signal reference levels from the previous article. Microphone specifications are almost universally given in dBV, or relative to a 1VRMS signal (0dBV = 1VRMS). This is different from the specification of many microphone preamplifiers, which are usually stated in dBu, or relative to a signal of 0.775VRMS. The difference, as we recall, is 2.2dB:
20 * log ( 1 / 0.775) = 2.2dB
Such that 0dBV is 2.2dB “hotter” than 0dBu. Always be aware of that required adjustment when comparing specifications!
Sensitivity
This is a measure of a microphone’s electrical output for a given acoustic input. The standard is 1 Pascal (Pa), which is equivalent to 94dBSPL, measured at the capsule, using a standard 1kHz sine wave tone. The typical sensitivity range for dynamic microphones (whether moving-coil or ribbon) is between -60dBV to -50dBV, whereas condenser microphones tend to be about 20dB higher, at -40dBV to -30dBV. Thus, a condenser microphone on the same source at the same distance should need about 20dB less gain from the preamplifier.
Of course, a condenser microphone often isn’t used at the same distance as a dynamic microphone would be on the same source. This is because condensers are used for applications where far-field microphone techniques are desired, such as stereo recording techniques, but also simply because it’s not necessary—many condensers have low enough self-noise that they don’t need close placement for good signal-to-noise ratio.
We’ll consider those factors next, but first, let’s dispel a common misperception about condenser microphones: they are not more sensitive to off-axis, ambient, or “room” sound than a dynamic microphone in the same application. That is, they do not “pick up more room sound” as a function of their operating principle. The response of a microphone is described by its polar pattern and frequency response; there is no other function of operating principle that somehow overrides those measures.
It’s true that condensers usually have much better high-frequency response than moving-coil dynamics, and their typically lower self-noise allows resolution of details that are lost in the noise floor of a dynamic microphone/preamplifier signal chain. Given consideration of those factors, if you place a dynamic microphone and a condenser microphone of the same polar pattern at the same distance—say, 2m from the source, they will pick up the same relative amount of off-axis sound. Try it for yourself and listen! You probably don’t use moving-coil microphones 2m from a source, which is why you may have had that misperception.
All other things (operating principle, polar pattern, microphone circuit and/or transformer design) being equal, larger diaphragm microphones will tend to have higher sensitivity. That is, the output of the large diaphragm capsule will be greater—but the following circuit in the microphone can alter that signal with amplification, attenuation, or with a step-up or step-down output transformer.
A further consideration for the sensitivity of dynamic microphones is the type of magnet used: older designs used AlNiCo magnets, which are lower output than the more modern rare earth types—Neodymium (ND) and others.
We don’t need to worry too much about the details there, since we are merely concerned with the output. Looking at the Shure microphones, we find:
SM57 -56.0dBV/Pa
Beta57 (ND) -51.0dBV/Pa
SM81 (12mm) -45.0dBV/Pa
KSM44A (25mm) -31 (C), -37 (O), -36dBV/Pa (B)
Using those figures, we can consider our source and derive their output level. 94dBSPL is the “standard” source, but many will be quieter (a classical guitar 2m from the microphone, say 74dBSPL average), or much louder (a kick drum at its resonant head’s port—maybe 144dBSPL peak!) Given that we want an output from our microphone preamplifier that is a line level of +4dBu (+1.8dBV; we will round to +2dBV), but with peaks below a maximum level of +22dBu (+20dBV) how much gain do we need for each microphone on those sources?
| Microphone | Guitar mic output (average) | Required preamplifier gain | Kick drum mic output (peak) | Maximum preamplifier gain |
| SM57 | -76dBV | +78dB | -6dBV | +26dB |
| Beta 57 | -71dBV | +73dB | -1dBV | +21dB |
| SM81 | -65dBV | +67dB | -5dBV* | +25dB |
| KSM44A (C) | -51dBV | +53dB | +3dBV* | +16dB |
* The SM81 and KSM44A require their internal attenuators to be engaged to tolerate 144dBSPL.
It can be seen that the high sensitivity of the KSM44A is required to limit the preamplifier gain to a reasonably attainable +53dB on a quiet source. In practice, a full line level output of +4dBu is not often required, as the following stage either might offer another gain stage, or be capable of supporting the lower “consumer” line level of -10dBV, as many ADCs can.
At the other end of the spectrum—kick drum—there are many preamplifiers that have minimum gain of +10dB or more. Thus, even with the attenuators engaged on the microphones, it can sometimes be necessary to use inline attenuators to further reduce the microphone signal to a level that the preamplifier can tolerate. Attenuation will be considered in detail in a later post.
Self-noise
This specification describes the microphone’s noise floor relative to its sensitivity. It’s a relative figure because it is stated in an acoustic equivalent. In other words, it gives us an idea of the quietest sound that can be resolved by that microphone.
There are different measures, or weighting factors used for self-noise, which can yield dramatically different figures. A-weighted is the most common, but wasn’t designed for noise measures, but rather for human perception of loud volumes. The lesser-seen CCIR quasi-peak measure is designed to be a closer equivalent to perceived acoustic noise. The CCIR measure is often 10dB higher! The unweighted noise figure is not often stated for microphones, but will occasionally be seen for microphone amplifiers.
This variance is not too critical if we mainly consider the self-noise figure as comparative. Most sound technicians do not measure the absolute acoustic noise floor in an environment; they will merely listen to see if the microphone’s noise floor is obtrusive for a given application, and if so, select a quieter microphone.
Self-noise figures are normally not given for dynamic microphones. This is because the noise of a strictly passive dynamic microphone (that is, one that does not contain an amplifier in the microphone, which most do not) only consists of thermal noise. We can measure that and derive a self-noise figure, but for whatever reason it’s not stated by the manufacturers. The thermal noise of a 150Ω source (the standard for a microphone output) is -133dBV (unweighted)—here are the details if you’d like to calculate for yourself.
The Shure SM57 has higher source resistance of 310Ω, which using the noise calculator yields thermal noise of -130dBV (unweighted), or about -133dBA. With -56dBV/Pa sensitivity, it has unweighted thermal self-noise of 20dBV (unweighted), which would be about 17dBA.
Because of the low output of the dynamic microphone, the input noise of the following preamplifier becomes critical. Issues with dynamic microphone noise and amplification were considered at length in this post.
Given a microphone’s sensitivity (again, stated at 94dBSPL) and self-noise, we can derive its absolute noise floor. For example, the KSM44A (C) has sensitivity of –31dBV, and an incredibly low self-noise of 4dBA:
-31dBV – 94dBSPL + 4dBA = -121dBA
That gives us useful information about the required noise performance of the following microphone preamplifier—its equivalent input noise (EIN). Ideally, the preamp’s EIN figure should be at least 6dB lower than the microphone’s absolute noise floor. Be careful here, as preamplifiers are commonly specified in dBu rather than dBV. Don’t forget the 2.2dB adjustment!
So on the same source, the KSM44A has a much less stringent ideal requirement for preamplifier EIN: -127dBA, vs. -139dBA (good luck finding that!) for the SM57. And even then, the KSM44A will still be 13dB quieter. It can be thus be seen why dynamic microphones aren’t well suited to recording quiet sources or moderate sources in the farfield.
Dynamic range and Maximum SPL
How wide of a range and loud of a sound can a microphone tolerate? The specification for maximum SPL tells us. This is more often seen for condenser microphones, as their amplifiers will have a maximum signal voltage before clipping is induced. However, the concept is also relevant for dynamic microphones—sometimes because the maximum excursion of the coil is reached, or because of saturation of the output transformer. In the case of ribbon microphones, it could be the SPL at which the ribbon is destroyed! The good news is that for most dynamic microphones, even if not specified, this figure is well in excess of 130dBSPL, and often much higher—the Shure Beta 52A is famously rated at 174dBSPL!
Condenser microphones will typically have a rating above 130dBSPL—the KSM44A (C) is 134dBSPL, and the SM81 is 136dBSPL. The capsule won’t be damaged beyond that level, but the amplifier will be distorted. One solution to extend that threshold is attenuation of the capsule output before the amplifier via switchable attenuation in the microphone’s circuit. That technique can be used for any maximum SPL, although at truly extreme volumes, it may be possible for the diaphragm to hit the backplate! The typical range for internal attenuation is -10 to -20dB, as seen in the Shure microphones.
All of these levels seem so high as to not be a concern, but when close-micing instruments—especially drums—levels in excess of 140dBSPL are possible. Microphones designed for those applications will be adequately specified.
Low-voltage condenser microphones often have lower maximum SPL, and too frequently aren’t rated. The maximum range of such microphones is usually in the range of 110-130dBSPL, but there are some models that can’t tolerate even those levels. Beware of unspecified condenser microphones!
Another consideration is the interaction of frequency response and maximum SPL. The SPL and sensitivity specifications are given at 1kHz. It’s possible to exceed a microphone’s maximum SPL without the source necessarily being audibly objectionable at 1kHz! Two examples: when close-micing drums, proximity effect will increase a directional microphone’s low-frequency response above that as given at 1kHz, and thus the microphone could distort. Similarly, an omnidirectional microphone used on loud program material (such as an amplified concert) will naturally experience higher SPLs at low frequencies, due to the flat low-frequency response of the omnidirectional microphone, and the louder low-frequency content of typical program material. In both cases, the problem must be considered as a function of polar pattern: an omnidirectional microphone can be selected for the nearfield source to eliminate proximity effect, and a directional microphone (with its natural farfield low-frequency rolloff) can be selected for program material with excessive low-frequency content. These factors will be explored next.
Frequency response and polar pattern
Here we leave the boring world of figures and enter the land of charts and graphs! We consider these two specifications together, because they are interrelated, and are often both stated to some degree on the same charts. That is, it’s common (and ideal) to find polar pattern stated at various frequencies, and frequency response stated at various angles of incidence. For example, here are the polar charts for the SM81 and KSM44A (C):


So we see the polar patterns at six discrete frequencies. We can draw two conclusions from those charts: first, a cardioid polar pattern tends towards omnidirectional at low frequencies, and towards hypercardioid at high frequencies. Second, that the polar pattern of the SM81 is more consistent across frequency than the KSM44A—especially note the 10kHz response. That is because of diaphragm size; it’s easier to make a consistent pattern in a smaller diaphragm. This is an important reason why small diaphragm microphones are preferred for farfield microphone placements. Of course, we already learned that small diaphragm microphones tend to have higher self-noise, which is the opposite of what we want in the farfield! We have to find the happy medium that suits our source.
I don’t publish polar pattern charts for Naiant microphones, because I feel that they are described well enough by a frequency response chart that plots the major axes of interest: 0°, 90°, and 180° for most polar patterns, as well as 135° for hypercardioid. The variance between on-axis and minimum off-axis response across the frequency spectrum is a clear indication of the consistency of the polar pattern. Plus, I just find most detailed polar pattern charts hard to read, and maybe even misleading! They are normalized at each frequency to 0dB at 0°, which is not necessarily the actual response of the microphone. I feel that the frequency response chart is a clearer depiction of the microphone’s actual response, and is more easily interpolated for axes not given.
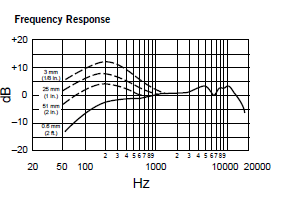
The frequency response (“FR”) charts also should show a phenomenon not described in the polar pattern chart: proximity effect. A good FR chart will show on-axis response at 1m, and for directional microphones (all of which will exhibit proximity effect to some degree), at a closer distance (25-30cm, sometimes even closer for microphones designed for speech). The two measures will be dramatically different! Beyond 1m, low frequency response doesn’t drop too much more, but inside 25cm, it will continue to rise, eventually dominating the FR of the microphone. Let’s review the FR chart for the Beta 57, with its supercardioid polar pattern yielding a healthy proximity effect:
And finally let’s look at a different microphone with selectable omnidirectional and cardioid polar patterns: the Shure KSM141. In its FR charts we can see the effect of polar pattern on low-frequency response and proximity effect.

Now, if a manufacturer only shows one curve and doesn’t state the distance, be wary! Especially for a directional microphone that has a stated frequency response of “20Hz to 20kHz”. There is no way that is a 1m measurement! That could be fine for a dynamic moving-coil microphone that is mainly intended for nearfield use, but if it’s for a condenser microphone intended for the mid- or farfield, that is an inadequate specification.
On the topic of stated frequency response range, every microphone has some response across the full audio spectrum; it might be -20dB at 20Hz and 20kHz, but that’s still something, right? An honest statement of the frequency response range would be at a stated distance and no more than -3dB down from the reference response at 1kHz.
Using microphone specifications for microphone selection
As we noted at the beginning, a specification might not tell the audio technician if a microphone will sound good with a particular source, but they should give a strong indication of whether or not that microphone could not be suitable. Ask yourself the following questions about your application:
- Is a power source available? If not, select a dynamic microphone or battery-powered condenser.
- Is the source mainly on-axis (close micing) or mainly off-axis (stereo recording)? If the latter, consider the consistency of the polar pattern across frequency.
- Is the source loud or quiet? Consider the maximum SPL and self-noise specifications.
- Does your preamplifier have adequately low EIN for a quiet source? If not, select a microphone with higher sensitivity (or use a low-noise inline amplifier).
- Does the preamplifier have inadequate headroom or high minimum gain? Consider a microphone with lower sensitivity, or use an attenuator.
- Does the application require off-axis rejection? At what angle? Select the polar pattern accordingly.
- Does the source require a tailored response, or is a flat response desirable? Select the microphone according to its frequency response chart.
- What is the desired recording distance? Understand the resulting low-frequency response due to proximity effect. Consider selecting a polar pattern as indicated by this requirement.
- Are there off-axis low frequency sources that must be rejected? Use micing distance and proximity effect to your advantage.
Hopefully this post has empowered you to use microphone specifications to evaluate these criteria.
Check back for Part III in this series—Microphone Powering!
